
R & D cell initiates and promotes various research related activities in the college. The Annual National Level Project Expo ‘Samudyama’ is conducted in the campus to invite maximum participation from B.Tech Final year students who are on the verge of completion of their major project which is an integral part of their curriculum.
Project Expo encourages students to apply their knowledge by imaginative thinking and creative engineering and technology approach. The main aim of this initiative is to provide a forum to showcase their projects and share their ideas. Students can explore and learn about the most intriguing concepts of technology. This event also provides an opportunity to the students to network with subject experts and industry professionals.
Literally meaning “Enterprise' Samudyama is an Endeavour to foster and enhance the culture of scientific inquiry and its relevance in real world applications. The basic aim of the expo is to provide a platform for the display of creative talents and virgin ideas of the students ,bring the best projects and the innovative thoughts of the students to the forefront. It however helps the students, who have done the best projects to carry the project forward by providing design support and entrepreneurial support, as required by the students. Students can also file a patent if they want. On 11th April projects from all the departments were on display and judges from AEC Bhongir picked up the best ones after a thorough review. Students had a great learning experience. Ms. M Chaitanya, HoD Mechanical Department was the convenor for this event.

| S. No | Name of the Student | Dept. | Judge |
|---|---|---|---|
| 1. | Mohd Abed Hussain, Mohammed Nadeem, T Madhavachary | CE | Mr. Santhosh |
| 2. | JyotiMayeekar, RishabhHrushan | CSE | Mr.SrikanthJatla |
| 3. | P. Nikhila Bharadwaj, G. Santhosh, N. Upendra Gupta | ECE | M. Shravan Kumar Reddy |
| 4. | P. Dharani Kumar, R. Rambhupal Reddy, B. Karthik Reddy | EEE | Mr.Narender Reddy |
| 5. | Shubham Kumar, Pankaj Kumar Pradhan, Zakeer Hussain | ME | Mr. S . K. Chanda |
| Best Project Award – College Level | |
|---|---|
| Name of the Student | Department |
| Shubham Kumar, Pankaj Kumar Pradhan, ZakeerHussain | ME |
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A0145 12841A0154 12621A0149 |
CHANDRAKANTH JADHAVS AMMAJI SAI KRISHNA MOTHE |
Pervious Concrete | Pervious concrete (also called porous concrete, permeable concrete, and nofines concrete and porous pavement) is a special type of concrete with a high porosity used forconcrete flatwork applications that allows water from precipitation and other sources to passdirectly through, thereby reducing the runoff from a site and allowing groundwater recharge.Pervious concrete is traditionally used in parking areas, areas with light traffic, residential streets,pedestrian walkways, and greenhouses. To prevent reduction in permeability, pervious concreteneeds to be cleaned regularly. Cleaning can be accomplished through wetting the surface of theconcrete and vacuum sweeping. | 

|
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A0278 12841A02A4 12841A0284 |
M. AMULYA UNDI KIRAN P. PRANAYA | Agrobot Designed As Plant Watering System | In recent years, the development of autonomous vehicles in agriculture has experienced increased interest. This development has led many researchers to start developing more rational and adaptable vehicles. In the field of agricultural autonomous vehicles, a concept is being developed to investigate if multiple small autonomous machines would be more efficient than traditional large tractors. These vehicles should be capable of working 24 hours a day all year round, in most weather conditions and have the intelligence embedded within them to behave sensibly in a semi-natural environment over long periods of time, unattended, while carrying out a useful task. Now here is a module designed for watering the plants. For bigger plants like coconut, mango, etc., the total field need not be watered. Instead watering should be done where the particular plant is present. So our vehicle is equipped with water tank, which will identify where the plant is present and water it automatically. And whenever the tank is empty it comes to the home position by itself for refilling the tank. Such types of agricultural robots that can take self-decisions are called as autonomous AGROBOT’s. Here we present a proto-type model of such robot, which does the above-mentioned things without any manual help. |


|
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A0278 12841A02A4 12841A0284 |
M. AMULYA UNDI KIRAN P. PRANAYA | Agrobot Designed As Plant Watering System | In recent years, the development of autonomous vehicles in agriculture has experienced increased interest. This development has led many researchers to start developing more rational and adaptable vehicles. In the field of agricultural autonomous vehicles, a concept is being developed to investigate if multiple small autonomous machines would be more efficient than traditional large tractors. These vehicles should be capable of working 24 hours a day all year round, in most weather conditions and have the intelligence embedded within them to behave sensibly in a semi-natural environment over long periods of time, unattended, while carrying out a useful task. Now here is a module designed for watering the plants. For bigger plants like coconut, mango, etc., the total field need not be watered. Instead watering should be done where the particular plant is present. So our vehicle is equipped with water tank, which will identify where the plant is present and water it automatically. And whenever the tank is empty it comes to the home position by itself for refilling the tank. Such types of agricultural robots that can take self-decisions are called as autonomous AGROBOT’s. Here we present a proto-type model of such robot, which does the above-mentioned things without any manual help. |
|
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A0283 12841A0270 |
NIDHI KUMARI DHEERAJ G.V.V |
Path Following Robot Used To Acquire Data From Hazardous Place | The Line follower robot is a mobile machine that can detect and follow the line drawn on the floor. Generally, the path is predefined and can be either visible like a black line on a white surface with a high contrasted color or it can be invisible like a magnetic field. Therefore, this kind of Robot should sense theline with its Infrared Ray (IR) sensors that installed under the robot. After that, the data is transmitted tothe processor by specific transition buses. Hence, the processor is going to decide the proper commandsand then it sends them to the driver and thus the path will be followed by the line follower robot. This robot is aimed to acquire digital data from dangerous places like chemical mixing plants where toxic gases are produced, radiation effected areas, power plants, Boilers, Furnaces, etc., where human beings cannot stay there for long time to collect the data. At these places, this Robot is quite helpful, which follows the line that is marked with black paint and reaches to the destination for collecting the digital data. Whenever the vehicle reaches its reference point (where the data is available), it is halted there &acquires the data through wireless link constructed with optical sensors. The acquired data is displayed through LCD arranged over the vehicle, & travels in reverse direction to reach its starting point where people are waiting to read the data. The Robot remains here until the start button is depressed. |

|
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A0524 12841A0528 12841A0541 | P Anish P.Prathap Bhargav Manikanta Sai Akhil | Smart Sprinkler System | This paper describes the design and implementation of a smart sprinkler system, utilizing a mesh capable wireless sensor network for monitoring and controlling field irrigation systems. Soil types and their characteristics with regards to water retention were investigated. The hardware and software for the sensor and sink nodes were implemented using the core of the WSN communication Xbee Series II Zigbee modules. A user interface to monitor the sprinkler system and change control parameters was developed. The system was tested for accuracy by comparing sensory field data with comparable data from alternative sensors from agricultural field test laboratories. It was successful in controlling the soil moisture levels in the test field by keeping the moisture levels between the desired thresholds. A relatively inexpensive way to automate water irrigation was established using low cost components for small scale irrigation applications. |  
|
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A05F3 12841A05G0 12841A05G6 | PVSM Ravali Ravindaer Kumar Shikha Maloo |
Fall Detection | With the introduction of new technology in our daily life, it is essential that this technology is used for the aid of the elderly. Falls cause a very high risk to the elderly's life. Accordingly, this paper's focus is on technology that would aid the elderly. These technologies include: Wearable- based, audio- based, and video-based fall detection systems. This paper surveys the literature regarding fall detection algorithms using those three branches and the various sensors they employ. Looking at wearable technology, the technology is cheap and accurate but inconvenient. Audio-based technology on the other hand is more convenient and is cheaper than video-based technology. However audio-based technology is hard to set up compared to video and wearable-based technologies. Video- based technology is accurate and easy to set up. At the moment, video-based technology is the most expensive compared to the other two, and it is also prone to occlusion. However as homes become smarter and prices for cameras continue to drop, it is expected that this technology will be the best of the three due to its versatility. |  |
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A0145 12841A0154 12621A0149 |
CHANDRAKANTH JADHAVS AMMAJI SAI KRISHNA MOTHE |
pervious concrete | Pervious concrete (also called porous concrete, permeable concrete, and no fines concrete and porous pavement) is a special type of concrete with a high porosity used for concrete flatwork applications that allows water from precipitation and other sources to pass directly through, thereby reducing the runoff from a site and allowing groundwater recharge. Pervious concrete is traditionally used in parking areas, areas with light traffic, residential streets, pedestrian walkways, and greenhouses. To prevent reduction in permeability, pervious concrete needs to be cleaned regularly. Cleaning can be accomplished through wetting the surface of the concrete and vacuum sweeping. |   |
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A0130 12841A0119 10841A0105 | PENDKAR RAMRAJKOTAGIRI VIJAY KUMAR BODDU MURALI KRISHNA | Comparison of manual and staad G+4 | STAAD or (STAAD.Pro) is a structural analysis and design computer program bought BY Bentley Solutions. The commercial version STAAD.Pro is one of the most widely used structural analysis and design software. It supports several steel, concrete and timber design codes. This software reduces the hardship analysis. |
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A0430 12841A0442 12841A0449 |
PURMA ANIL REDDY BANDELA RESHMA R SHASHIDHAR REDDY |
Hand gesture based wireless control of Robot designed with MEMS | The interaction between man and machine has gained importance. Generally, some command inputs are given to control robot by pressing keys. In this project , one need not press any keys, instead by moving the hand in one direction i.e.., through hand gestures, the robot will also move in particular direction and is implemented using MEMS technology. it can be employed in wheel chair for disabled persons, military purposes, control of home appliances |   |
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A0472 12841A0405 12841A0471 |
DODLE RAMYASWETHA B SHRAVYA DEVOLLA SRINIVAS |
Artificial Intelligence Based Video Capturing And Transferring To Pc Using Robot | The autonomous robot is an unmanned vehicle that runs in a field continuously by sensing an obstacle in the path. The microcontroller always measures the voltage giving by the sensor and whenever the obstacle occurs it takes a control action to turn into left/right direction and avoids colliding any object. it can be used for surveillance , navigation, pick and place robot |   |
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A0369 12841A0361 12841A0382 12841A0363 2841A0383 12841A0386 12841A0381 12841A0395 12841A03A8 12841A0370 12841A0390 12841A03A1 |
D. Vivekananda Rao Ahmed Asif Abbas N.Saiteja B.Karthik Sai Omar Shahab Praful Deshpande M.Mukesh V.Sanjay Kumar P.Sai Kumar E.Manohar S.Ravi Kumar D.Akshay |
Design and manufacture of a Kart using 4-stroke petrol engine | The students involved successfully achieved their aim of designing a safe and functional vehicle. They also successfully executed the secondary objective of enhancing the driver’s comfort and safety along with increasing the performance and maneuverability of the designed vehicle. Since the project was a large undertaking further affected by time constraints, the project as a whole was divided into 4 core groups allotted to 4 different yet critical modules of development namely
|
  |
| S.NO | Hall Ticket NO. | Name | Project Title | Description | Photos |
|---|---|---|---|---|---|
| 1 | 12841A0302 12841A0318 12841A0319 |
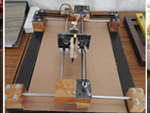
A. Sri Sailendra L. Prudhvi Raj M. Kranthi Kumar |
Conceptual design and making of a Cartesian plotter | A Cartesian plotter is a printer of sorts used to produce vector graphics by the mechanical movement of a pen or any other such instrument across the surface of a piece of paper or screen. The project was aimed at creating the model of an automated plotter to produce images by moving a pen held by a structure (called as a frame) that can move the pen in two orthogonal directions. Apart from apart from meeting the primary objective of the project, the design makes use of stepper motors, micro controllers and required frame and guide ways to raise or lower the pen as required in order to create the desired image. Depending upon the horizontal and vertical feeds given to the motors, the relative motion of the pen produced in these directions gives rise to various patterns or shapes as required. |
 |
